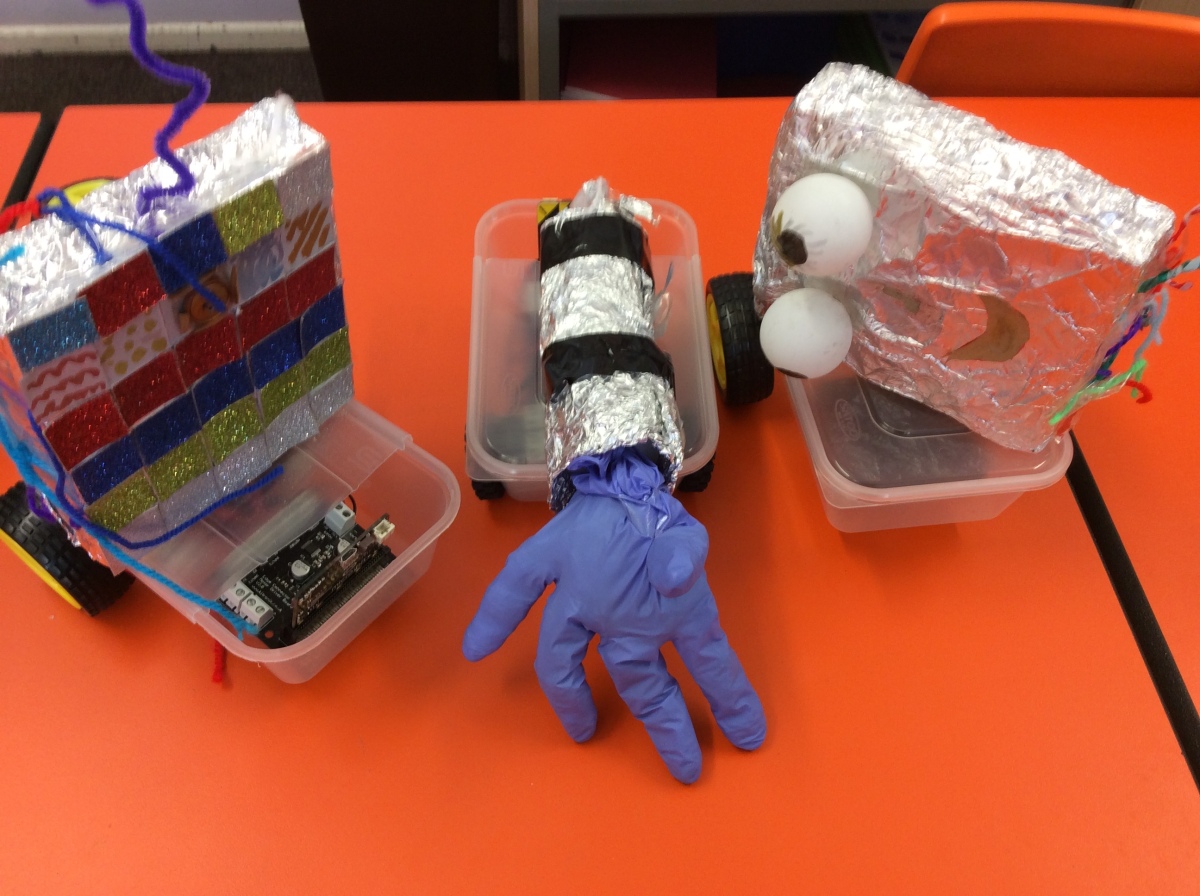
I had the pleasure of presenting at the #exabytes17 conference in Bradford on 7 July 2017. Yvonne Walker and I discussed our CAS Microbit project, making lunch box buggies on an Iron Man Theme! The resources for the project are on the CAS community site (sign up for free to download them all!).
Making lunch box buggies with Iron Man body parts!
I was delighted to present the work from our CAS project Using micro-bits across the primary curriculum at the CAS Annual Conference on 17th June 2017. I presented with Yvonne Walker from CAS and demonstrated one of the buggies that we had made as well as letting delegates loose on some microbits.
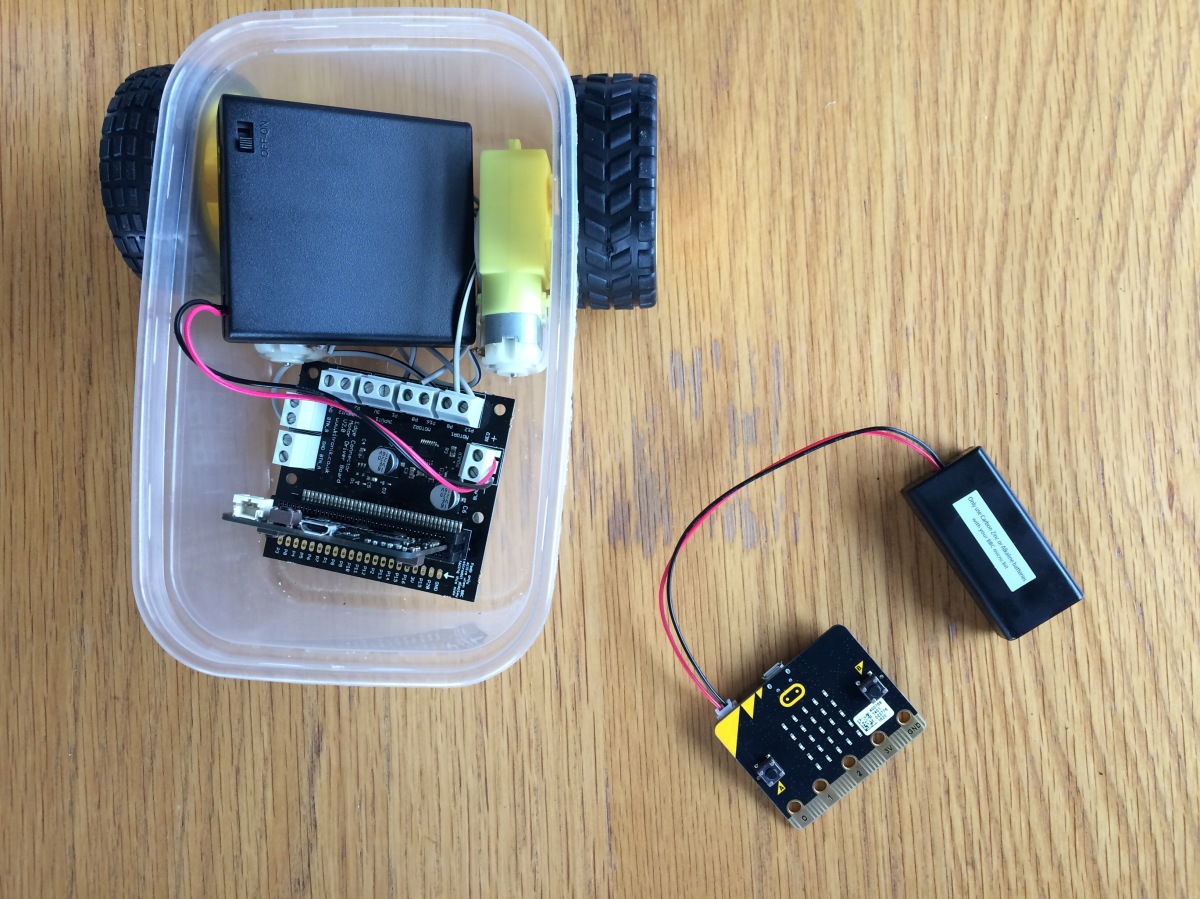
A second Microbit to use as a radio control for the buggy.
On Friday, a very large box of Microbits arrived from Kitronik (via BCS who are distributing the Microbits for our CAS project). So I finally had a second Microbit to try out.
First boot
The first Microbit I had was a gift from Yvonne Walker at CAS, so I hadn’t one fresh out of the packet before. I was delighted to discover that once the supplied power pack was attached, the Microbit booted and ran an introductory code. The microbit ‘introduces’ itself and walks you through using the buttons and accelerometer (see Intro to the Microbit from Tech will save us). I will be able to use this for our first lesson using the Microbit, once we have also looked at the safety leaflet and thought about how to handle them safely. (You can re-instate the start-up code from the copy on Tech will save us).
Programming the remote control
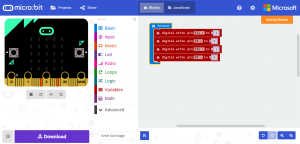
Tech will save us has a nice tutorial and code to make a remote control for their buggy. I adapted this code as I had used a different command to control the motors. The remote control Microbit now uses the accelerometer to move the buggy forwards and backwards, pressing button A makes the buggy turn clockwise and button B makes it turn anticlockwise, pressing A+B stops the buggy. The code could do with some refinements as at the moment, it is a two man job to turn the buggy off! Holding down A+B continuously stops the buggy still, whilst someone else switches the power pack off. I’ve also lost the granularity of control I had before, so that going forwards and back for a set time, and turning clockwise and anticlockwise for a set time to effectively turn 90 degrees has been lost within the forever loop. So, any suggestions on how I can get that control back and/or how I can make A+B stop the buggy by one press would be really helpful! The code I have so far is shared below (for the PXT block editor).
We are building lunch box buggies controlled by Microbits as part of a CAS project. So far, I’ve built two versions of the buggy (one in Lego and one using Kitronik kit) and quickly written some very simple code to make it move forward.
I wanted to have some basic sections of code that our children could tinker with and then put together in a sequence to navigate the buggy around a given course.
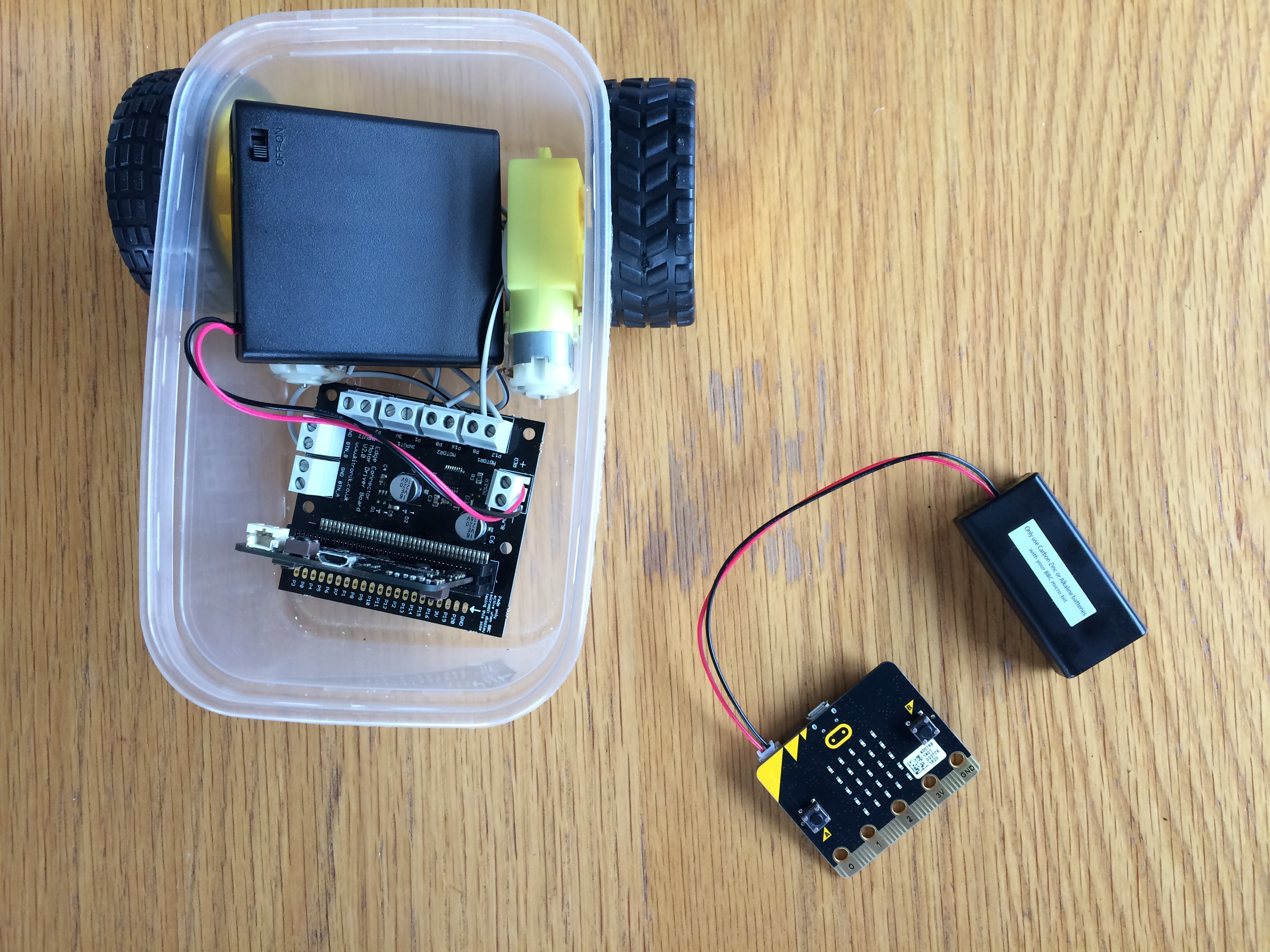
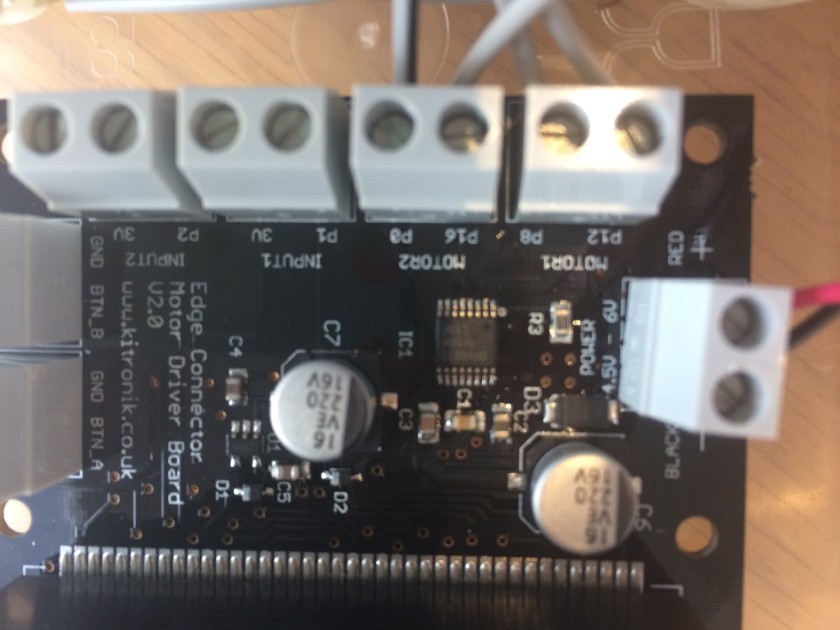
As I understand it, the motor board has four pins that between them can control 2 motors. There are two wires from one motor to the motor board that connect to two pins (i.e.: motor 1 uses PIN12 and PIN8 and motor 2 uses PIN16 and PIN0).
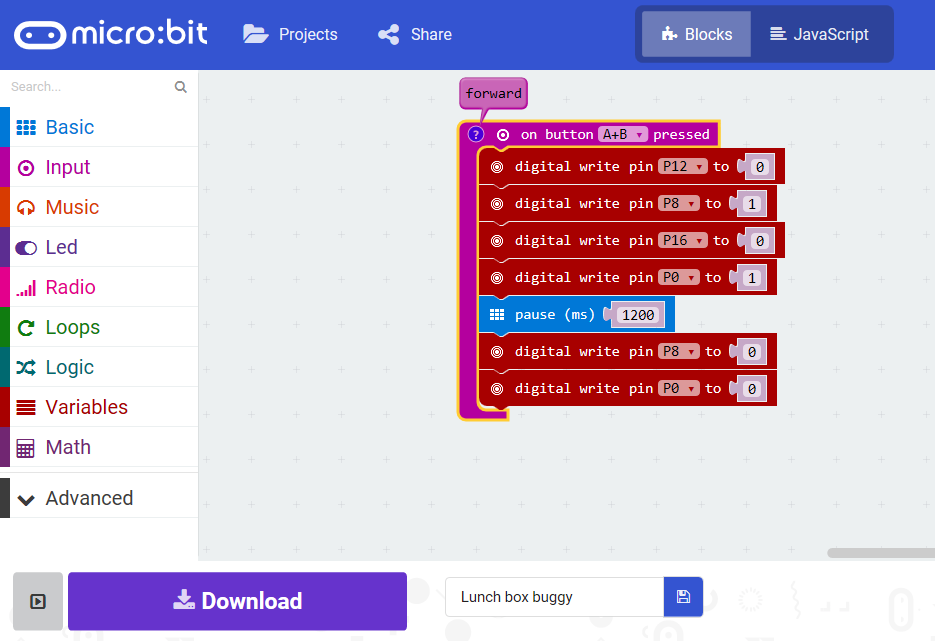
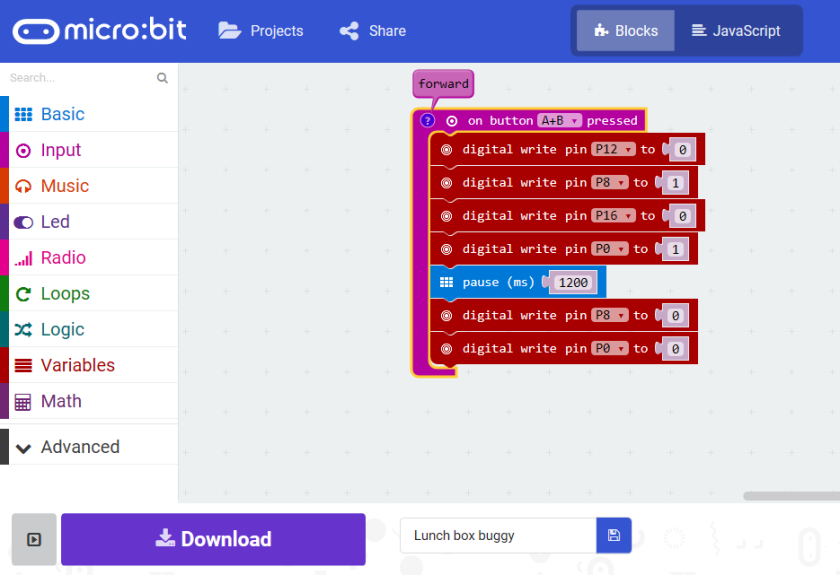
motor boards and pinsUsing the command ‘digital write pin12 to 1’ turns the electricity on to pin12 (on motor 1) and ‘digital write pin12 to 0’ turns the electricity off to pin12. So going forward when both button A+B are pressed looks like this:
After some tinkering and with lots of help from my beloved Husband (who knows his way round Linux and other command line code) and the lovely Lorraine Underwood, we found we could add a comment to label this section of code as ‘forward’ (go to the JavaScript and add a line at the top with ‘// forward’, then back into blocks and the little blue question mark at the top left appears with a comment. We then worked out that by having one motor run forwards the other run backwards, we could turn the buggy in a circle. The tricky part was working how to make it stop, however, once we worked out that once a pin was turned on, it didn’t turn off until set back to 0, we realised that adding a pause then setting the pin back to 0 would run the motor for a set amount of time. After that it was a case of trying different amounts of time to get a quarter turn. Eventually we discovered 1200 ms was about the right amount of time!
I’ve tried the buggy on a few different surfaces at home as the wheels seem to slip sometimes, and the shape of the lunchbox, with slightly sloping sides causes the wheels to be a slight angle. All of this can make the turns slightly more or less than the 90 degree turn I want, but this is something we can debug with code and with the mechanical aspects with the children once we have the final buggies made.
The code I’ve written so far is published online in the PXT editor. Button A turns right (clockwise), Button B turns left (anticlockwise) and A+B makes the buggy go forward.
Using Microbit with Lego Mindstorms technic Lego in primary computing.
Like many schools we have equipment that was bought, well used by a couple of teachers and then they left, the focus on the curriculum changed and the equipment began to languish unloved and gather dust in a corner. We have several sets of Amusement Park Lego Mindstorms For schools (RCX1.0 controller, set number 9725) that haven’t been out of the box in at least the last three years (though the dust on the top of the boxes suggested and the fact that the sets were first released in 1998 leads me to suspect it may have been much longer!).
Whilst the Robolab software and the drivers can be made to work with Windows 10 (the original requirements were for Windows 95 – bless), I felt it was time to try something different.
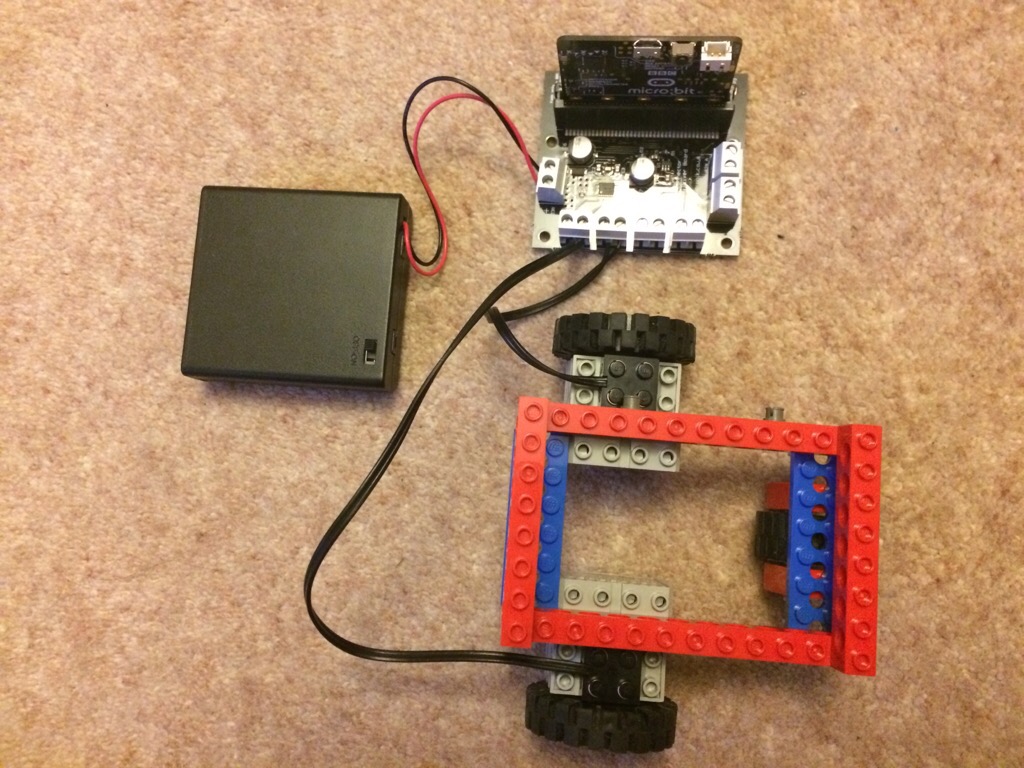
As part of a CAS cross-curricular project to use Microbits with our year 4 children, we are building lunchbox buggies. We have some kit to build buggies but in an effort to give as many children as possible a hands-on experience, whilst not spending any money, I turned to our old Lego kits.
The Lego motors are more powerful than the hobby motors we used from our buggy kit, but I kept the power pack (4×1.5V AA batteries) and the motorboard the same and hoped for the best!
I cut off one end of the Lego wire connectors, split and stripped back the wires and connected them to the motorboard.
I built a very simple frame and balanced the board, Microbit and power pack on top and switched it on and to my delight it worked!
So we will be sacrificing a set of Lego connectors but gaining a new set of resources at no cost to make more buggies. This will also allow us to offer two different ways of building buggies. Whilst the Lego one is perhaps more familiar, building the frame will be more of a challenge than using the lunch box and there is more physical dexterity and care needed to attach the wires to the motors when not using the Lego connectors.
So if you have some old technical Lego gathering dust dig it out and give it a go!
My first attempt at building a simple buggy controlled by a microbit.
Next term at Rushey Mead Primary, we are trialing the Primary CAS Hub Micro Bit Project.
Aim of the project
The DfE has identified a number of ‘opportunity areas’ DfE announcement areas where there is an opportunity to create more computing support for teachers in deprived areas. This project aims to create a programme of support for primary schools in those areas (or in other areas that are classed as being deprived) focusing on a cross-curricular scheme of work which embeds the development of pupil’s computational thinking skills and which uses the micro bit with the aim of enhancing learning and motivation in KS2 pupils.
The project aims to enable a CAS Hub to provide the teachers in the project schools with the resources, skills and knowledge to confidently teach their pupils using the scheme of work and to provide ongoing support in terms of evaluating the effectiveness of the teaching and learning and to produce a case study that exemplifies the impact of project. Hubs that are able to find 2 or 3 schools that are in deprived areas and who are willing to get involved in running this project will be entitled to a free class set of micro bits, as will their project schools. These Micro Bits have been kindly sponsored by the Micro Bit
The resource pack on the CAS teacher resources site (free sign up required) includes a cross-curricular SOW based on the Ted Hughes Iron Man novel and involves the pupils building their own Iron Man model (D&T) and a micro bit controlled buggy (CS) and using their creation to retell an aspect of the Iron Man story (IT).
Building the buggy
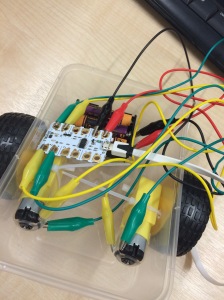
Nic Hughes’ Crumble controlled lunch-box buggyThe heart of the project is to make some simple buggy robots controlled by a microbit. Inspired by Nic Hughes’ Crumble buggy that I built in his CAS Annual conference workshop in 2016, (full instructions on his workshop slides) shown on the right, I thought we could make something similar using a microbit to control the buggy. Kitronik have very kindly got the project started by sending us enough kit to make 7 buggies and we will have microbits provided by the Microbit foundation. So it was my job in the holidays to check that this would actually work!
Building the buggy was straight forward, though I made a list of helpful tips to remind me of things I will need to sort when scaling this up at school with our children:
We need a supply of wire to connect motors to motor board and a system to either pre-strip the wires for the children, or a handy teaching assistant dedicated to the job in class! Attaching the wires to the motors is fiddly and it may be easier to solder them on.
When we punched holes in the lunch box, the instructions recommended using an electric drill, we thought a bradawl might work but it split the plastic, so resorted to hot wire instead. Again, this will need to be done ahead of time or supervised in the classroom.
It took my husband quite a while to find an appropriate slot head screw driver with parallel sides and very narrow head (3 mm) that would fit the very small screws in the connectors that hold the wires from the motor and batter packs in place on the motor board. We will need a good supply of these in the classroom!
Double-sided tape to stick the ball caster to the underside of the buggy worked really well.
The lunch box itself needs to be big enough for the wheels to clear the rim of the box – ours *just* made it!
Coding the microbit
The next step was getting the motors working. With some help from the wonderful Lorraine Underwood who managed via twitter to point me in the right direction whilst marooned in her car with a sleeping toddler, I succeeded in getting both motors working so the buggy can move forward.
What had perplexed me initially was that the microbit looks to have 4 main pins (the large gold ‘holes’), however, there are in fact 16 pins that can be addressed and when the microbit is popped into the motor driver board it all looks a bit more complicated! Looking closely at the motor driver board, you can see that pins P12 and P8 control Motor 1 and P6 and P0 control Motor 2. I also needed to know the right block to use – under the ‘device’ or ‘pins’ blocks – ‘digital write (0,1)’.
This slideshow requires JavaScript.
Finally, on Lorraine’s recommendation (and to see if I could transfer what I’d learnt in one coding environment to another one), I wrote the code again in the JavaScript blocks PXT editor. My very simple code (shown right)
link to the codeto make the buggy move forward simply gives power to the motors when the batter pack is turned on.
The next steps will be to make the buggy turn left or right and to add some degree of control over it, perhaps by using the buttons.