This week I have had the pleasure of working with three year 4 classes in our school to build our Iron Man Microbit buggies as part of our CAS project. Children have been learning about Ted Hughes’ Iron Man story in English lessons and so we started with discussing what the Iron Man would look like.
Next they created maps for the different parts of the Iron Man to move across and meet in the middle to begin to reassemble him back into an Iron Giant! Three groups worked together on each map, so that there were 3 body parts to get together. Some maps were 3-D with added ice-cream shops on the beach, boats in the sea and trees back on the hills behind the cliff, others were more simple and children focused on carefully measuring and mapping their route.





The children had two lessons introducing them to the microbits. First, we looked at the safety leaflet and linked this to the learning we had already done in Science on electricity. The children applied their science knowledge really well and could give good explanations of why water was not safe to have near the microbits. They were delighted when we then plugged them into a battery pack to play the start-up demo game that the microbits come shipped with (copies of the code are available so you can ‘reset’ the microbits if multiple classes are using them for the project).
In the second lesson, we talked and learned about input and outputs of various forms. We then used the ‘getting started tutorial’ on the JavaScript Blocks Editor (PXT) to work through coding different writing to be displayed when button A was pressed, and to generate a random number when the microbit was shaken. Some children took it further once they had discovered the ‘input’ blocks and had a response for every input!


We then spent a whole day focussing on building the buggies. We started by looking at the Barefoot computational thinking concepts and approaches to learning and sorted these according to whether the children understood the words or had not come across them. We learned what all the words meant and thought of examples together of how they might apply outside computing (they were all familiar with the analogy that algorithms are instructions like recipes), so for example, we can use Logic to predict what might happen in a story. The terms were quite difficult for our children, especially as the large majority have English as an Additional Language. However, we kept referring to them throughout the day, prompting children to start using the language as they worked. They soon began to recognise when they were using logic to predict which part of their buggy might be broken.


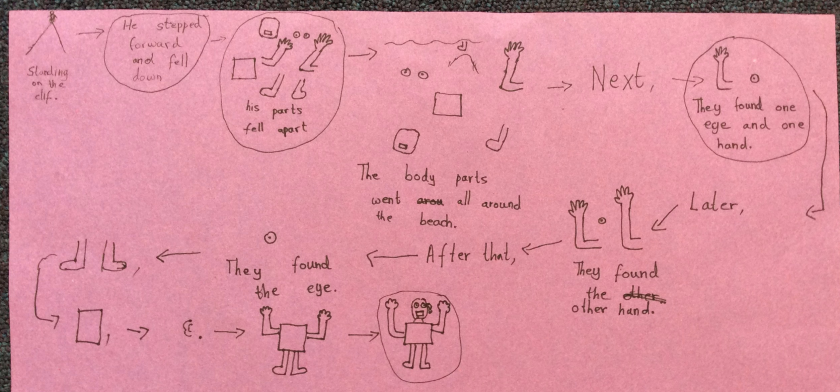
We started by drawing a text map of the first chapter of the Iron Man and then showing how this was an algorithm to tell the story in a sequence and that we had decomposed the story into parts. I then challenged the children to abstract the key parts of the story, choosing just four steps to retell the most essential plot points. This helped them to understand how abstraction was the process of removing unnecessary detail.


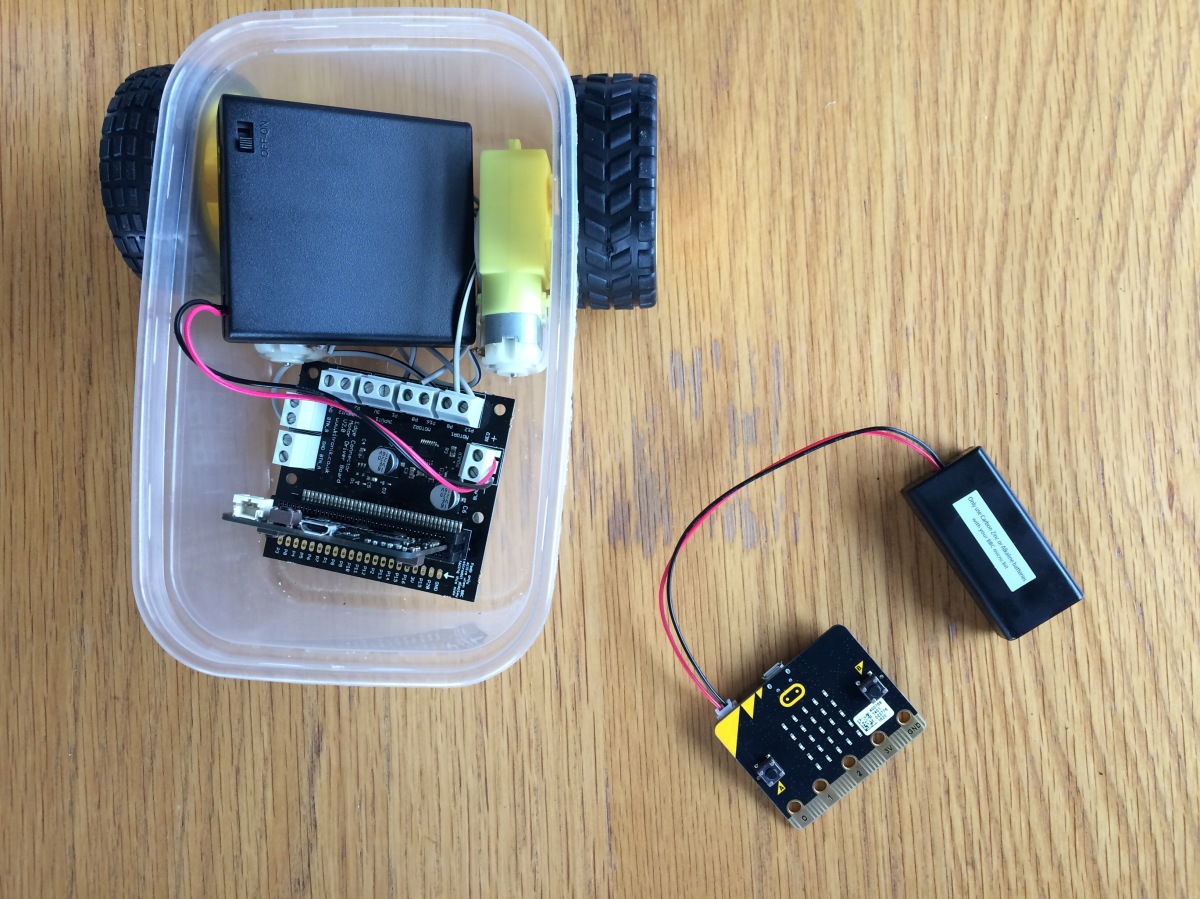
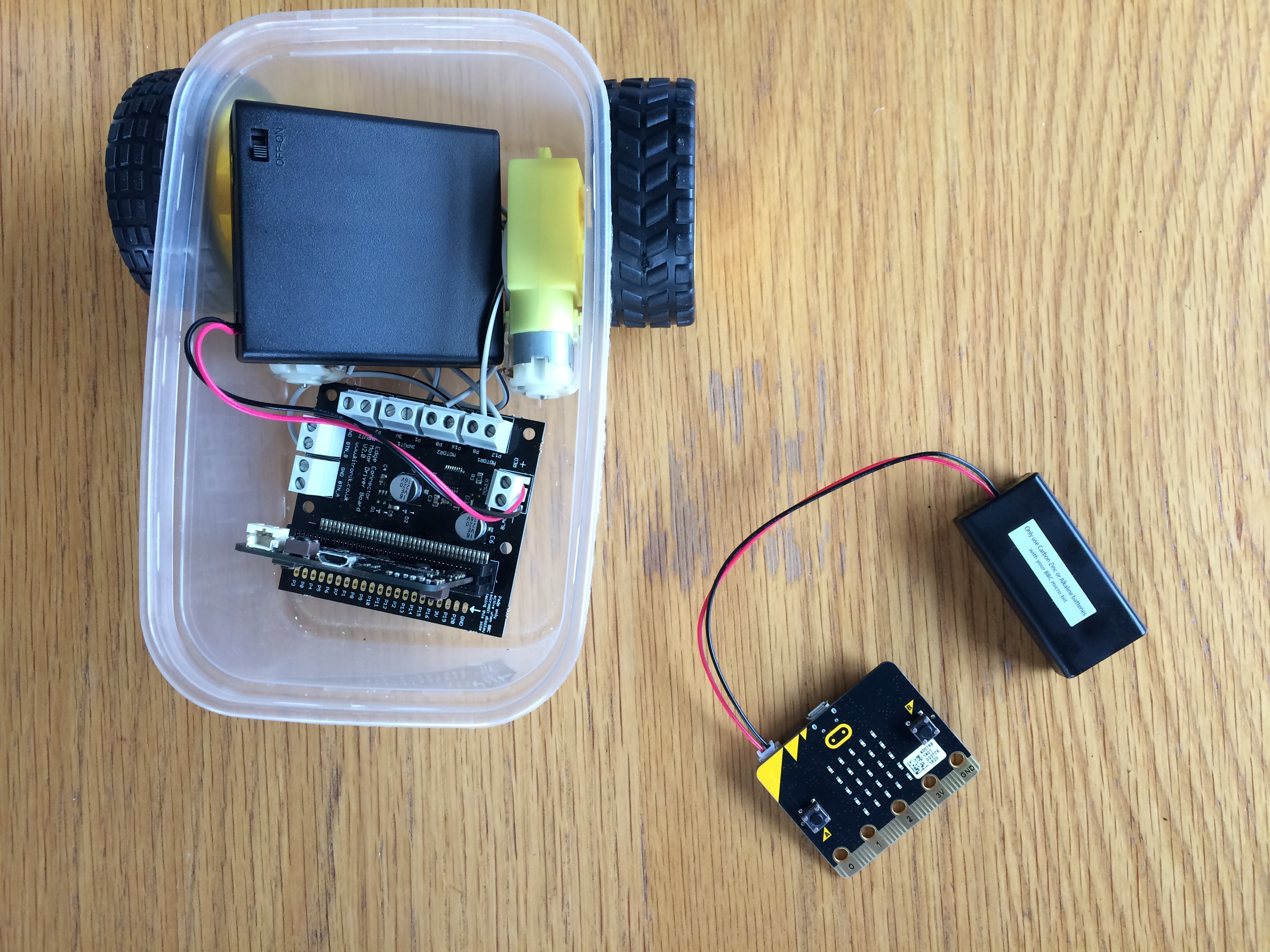
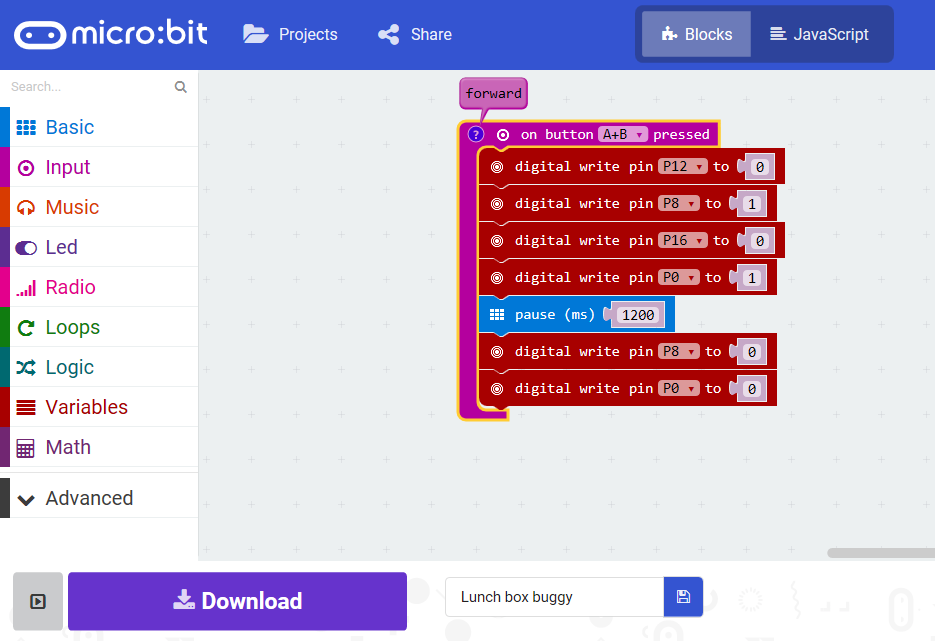
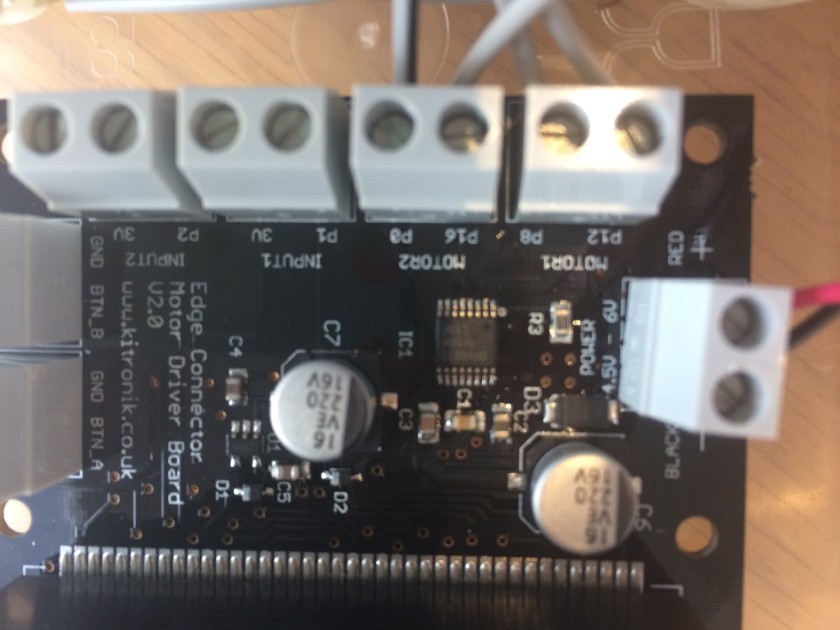
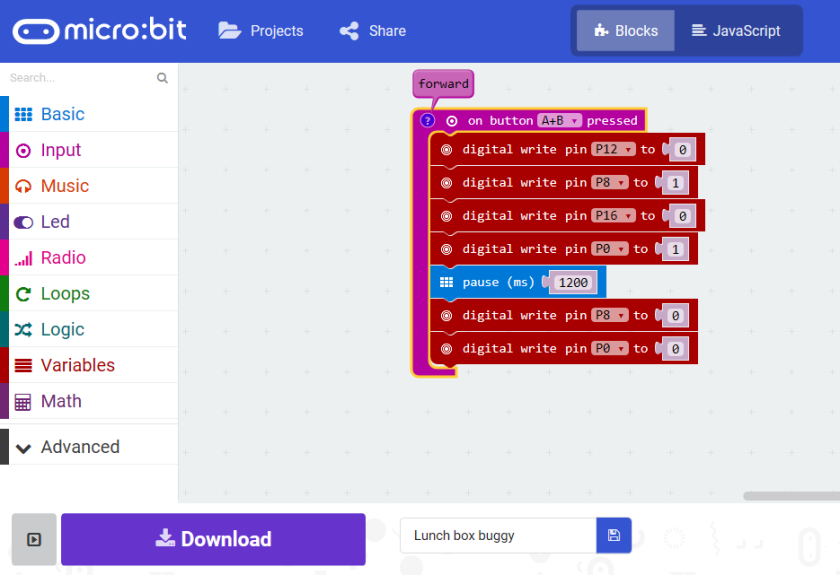
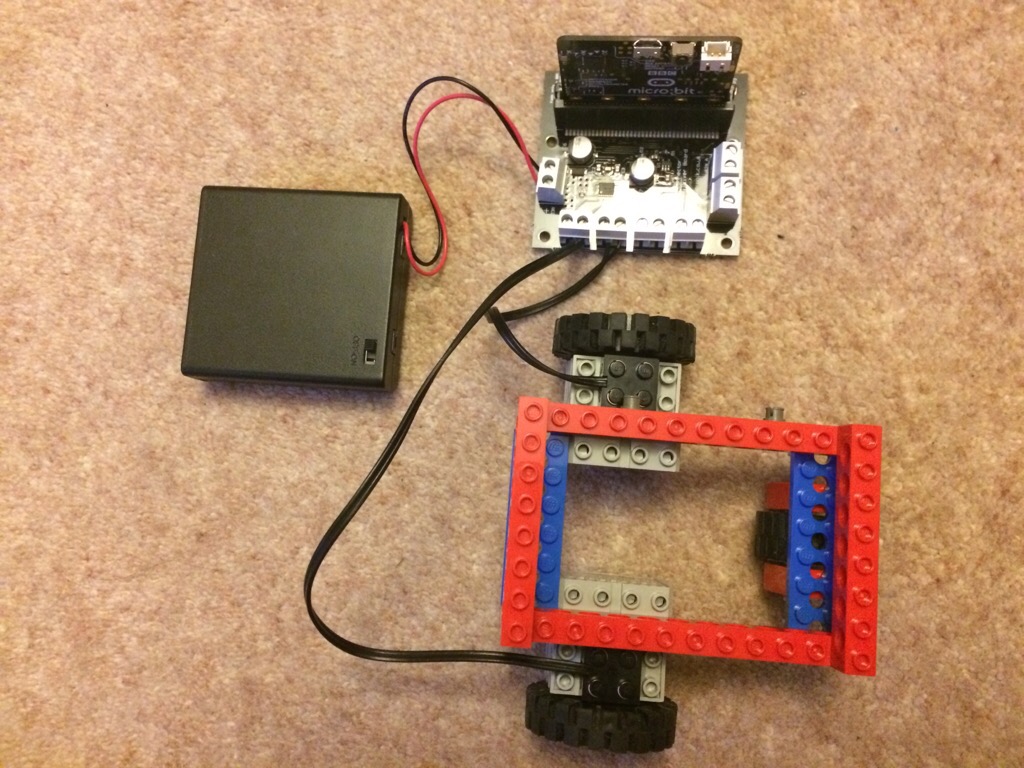
The children were given a microbit with the code for making the buggy move forward by about 30 cm when buttons A+B were pressed. This helped to identify any faulting wiring, problems with batteries before moving on to more complex coding.
We then allowed the children to tinker with this code to create the code for a left turn when button A was pressed, and a right turn when button B was pressed. Children quickly understood how to make the buggies move a shorter or longer distance by altering the code for moving forward, however, tinkering to create the turns was much more challenging and took some modelling and support from the me and the class teacher.
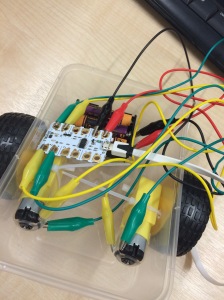
Finally, we glued the Iron Many body parts to the lunchbox lids (which had been cut down so that the children could reach the buttons on the microbits!) and set them off on the maps to meet up in the middle. All the children were successful in getting their Iron Man body part to move, some made them turn and others had a combination of turns and moving forwards to reach the centre.
The atmosphere in the classroom all day was amazing, the children were buzzing and engaged and despite many difficulties (with motors, wiring, wheels sticking on the lunch box lids, batteries inserted the wrong way round, coding errors to name a few!) they persevered and work together to have some success.